
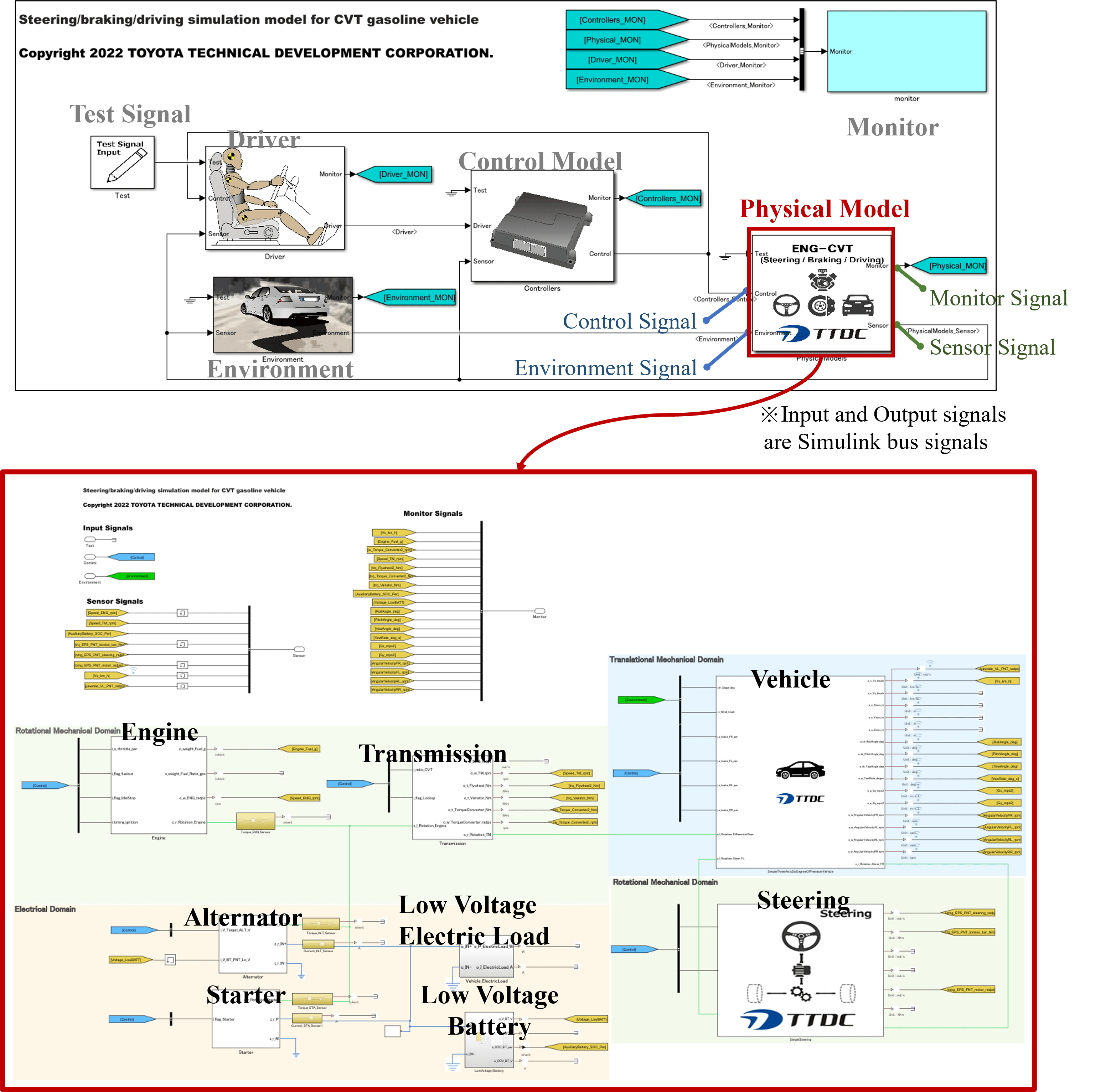
本モデルはCVT ガソリン車を想定した車両運動性能評価向けシミュレーション用プラントモデルである。
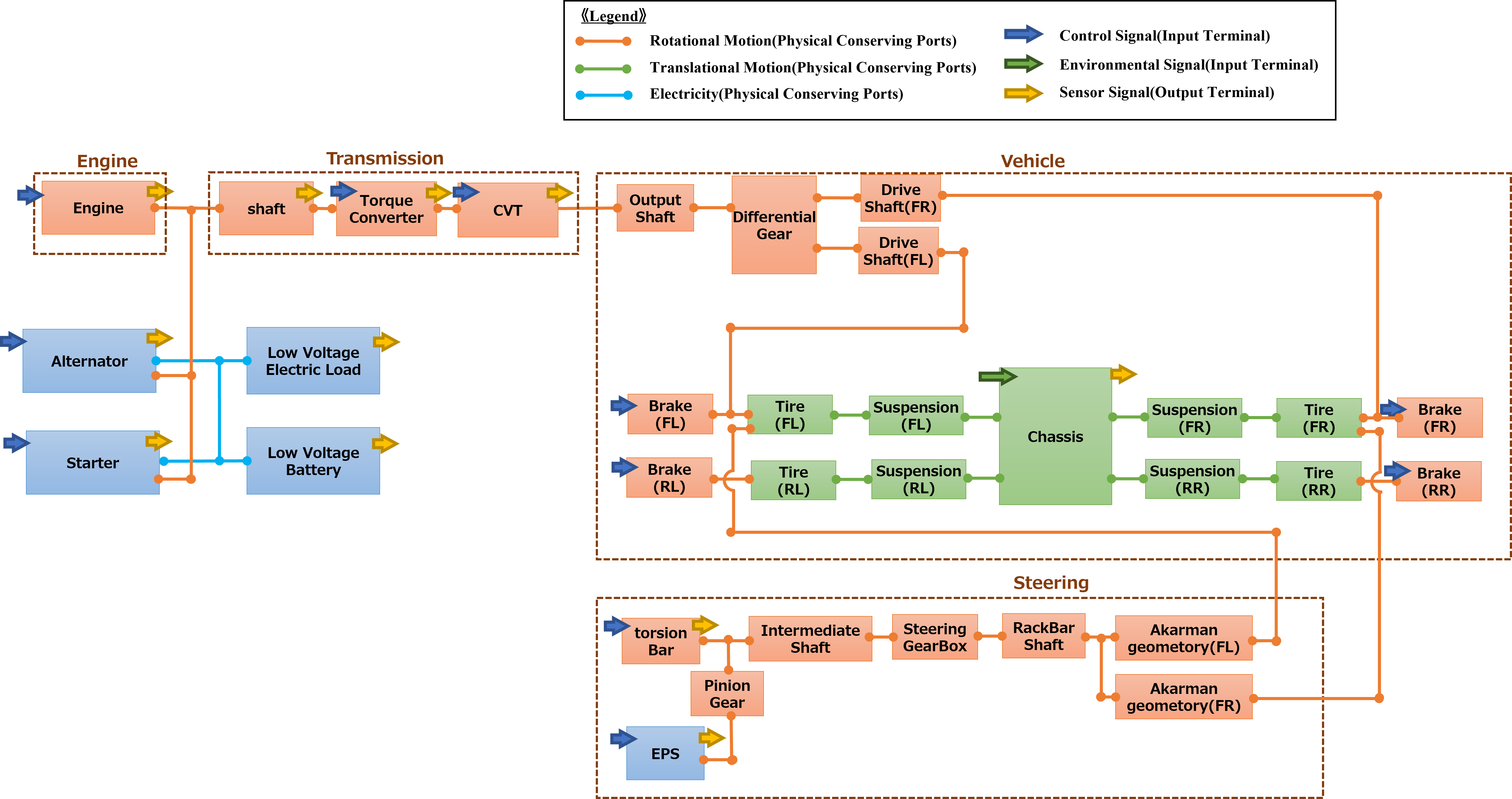
パワートレインは、エンジン(排気量1.5[L])・CVTから構成している。
シャシーは、ステアリング・車両(3軸6自由度の4輪モデル)から構成している。
電気系は、オルタネーター、スターター、低圧バッテリ、電気負荷から構成している。
シャシーは、ステアリング・車両(3軸6自由度の4輪モデル)から構成している。
電気系は、オルタネーター、スターター、低圧バッテリ、電気負荷から構成している。
本モデルの入出力端子は下記の通りである。
入力端子へは、制御信号と環境信号を接続。
出力端子へは、センサー信号やモニター信号を接続。
物理量保存端子へは、外部の接続無し。
入力端子へは、制御信号と環境信号を接続。
出力端子へは、センサー信号やモニター信号を接続。
物理量保存端子へは、外部の接続無し。
信号一覧:
・制御信号
スロットル開度、アイドリングストップフラグ、
フューエルカットフラグ、MBTからの点火タイミング、
CVT プーリー比、トルクコンバータのロックアップ指示フラグ、
ブレーキ開度(4輪)、目標モータトルク、
ドライバのステアリング操作トルク、
スターター作動フラグ、オルタネーター目標電圧
・環境信号
道路勾配、風速
・センサー信号
エンジン回転数、トランスミッション出力回転数、
低圧バッテリSOC、トーションバートルク、
ステアリング角速度、EPSモーター角速度、
車速、ヨーレート
スロットル開度、アイドリングストップフラグ、
フューエルカットフラグ、MBTからの点火タイミング、
CVT プーリー比、トルクコンバータのロックアップ指示フラグ、
ブレーキ開度(4輪)、目標モータトルク、
ドライバのステアリング操作トルク、
スターター作動フラグ、オルタネーター目標電圧
・環境信号
道路勾配、風速
・センサー信号
エンジン回転数、トランスミッション出力回転数、
低圧バッテリSOC、トーションバートルク、
ステアリング角速度、EPSモーター角速度、
車速、ヨーレート
※ 本モデルは、MBD推進センター発行の「自動車開発におけるプラントモデルIFガイドライン」の事例モデルの制御部と接続可能なプラントモデルとなっている。
接続方法 :
内部構成図 :
動作環境 :

ブロック図 :
ソルバー設定 :
・グローバルソルバー
- ソルバー:任意
- 演算周期:ローカルソルバーの設定値に依存
・ローカルソルバー
- ソルバー:後退オイラー法
- 演算周期:2.5 msec
- イタレーション回数:3回
- ソルバー:任意
- 演算周期:ローカルソルバーの設定値に依存
・ローカルソルバー
- ソルバー:後退オイラー法
- 演算周期:2.5 msec
- イタレーション回数:3回
モデル制約条件 :
- 本モデルは、実機通りの挙動及び挙動精度を模擬または保証するものではない。
- ライブラリフォルダ内のファイル構成を変更した場合、本モデルは動作しない。
- 上記の動作環境、ソルバー設定以外での動作しない可能性有り。
- 付属のパラメータセット以外では動作しない可能性有り。
- 初期状態は、停車状態である。
- ライブラリフォルダ内のファイル構成を変更した場合、本モデルは動作しない。
- 上記の動作環境、ソルバー設定以外での動作しない可能性有り。
- 付属のパラメータセット以外では動作しない可能性有り。
- 初期状態は、停車状態である。
実行方法 :
1. モデルファイルがあるフォルダへMATLABカレントディレクトリを移動する。
2. パラメータファイルを実行する。
3. モデルファイルを開く。
4. モデルを実行する。
2. パラメータファイルを実行する。
3. モデルファイルを開く。
4. モデルを実行する。
Ver. 1.0.0
for R2021a
