Download
Ver. 1.0.1
for R2021a

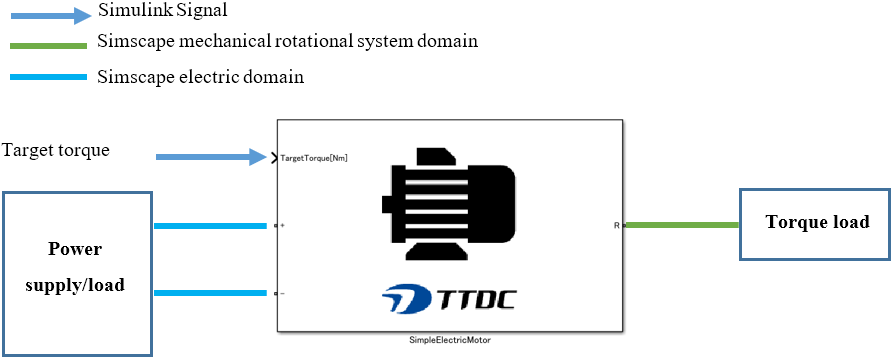
Simple electric motor model.
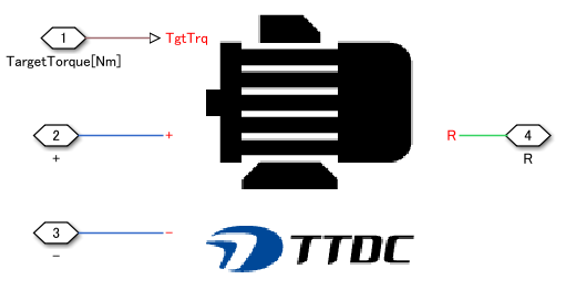
Connect the specified torque to the input terminal.
No output terminal.
Connect the mechanical rotation system domain signal to physical quantity storage terminal.
In response to the torque indicated by the controller, the current consumed / generated by the motor is calculated and the torque is output.
Motor loss can be easily considered by setting the motor efficiency value (friction is not considered).
The upper current limit can be set with parameters. The actual motor output torque is also limited according to the upper current limit.
No output terminal.
Connect the mechanical rotation system domain signal to physical quantity storage terminal.
In response to the torque indicated by the controller, the current consumed / generated by the motor is calculated and the torque is output.
Motor loss can be easily considered by setting the motor efficiency value (friction is not considered).
The upper current limit can be set with parameters. The actual motor output torque is also limited according to the upper current limit.
To connect a simple electric motor model:
Simple electric motor model internal configuration diagram:
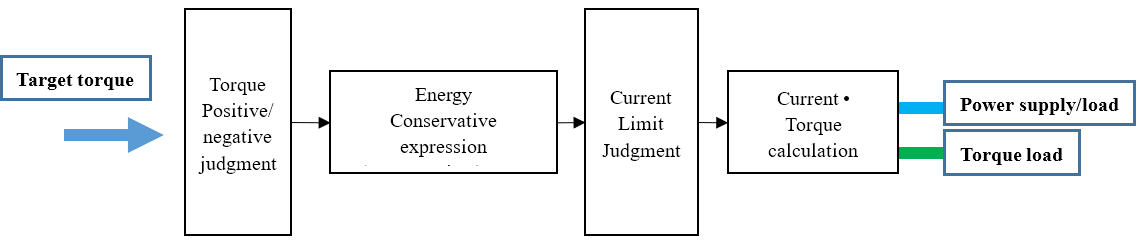
The internal configuration of this model
Operating environment:
 (※) Required for generating HDL Code.
(※) Required for generating HDL Code.
Block diagram:
Solver settings:
・Global solver
- Solver: Arbitrary
- Sample time: Dependents on the setting value of the local solver
・Local solver
- Solver: Partitioning solver method
- Sample time: 1 msec
- Number of iterations: once
- Solver: Arbitrary
- Sample time: Dependents on the setting value of the local solver
・Local solver
- Solver: Partitioning solver method
- Sample time: 1 msec
- Number of iterations: once
Model constraints:
- This model does not simulate or guarantee the behavior and behavior accuracy of the actual machine.
- If the file structure in the library folder is changed, this model does not work.
- Operation in other than the above operating environment and solver settings is not covered by the warranty.
- Operation with other than the supplied parameter set is not covered by the warranty.
- In the initial state, the torque load model shall be at the rest state.
- The Simulink model converted from this model by “Simscape to HDL” is not covered by warranty.
- If the file structure in the library folder is changed, this model does not work.
- Operation in other than the above operating environment and solver settings is not covered by the warranty.
- Operation with other than the supplied parameter set is not covered by the warranty.
- In the initial state, the torque load model shall be at the rest state.
- The Simulink model converted from this model by “Simscape to HDL” is not covered by warranty.
How to execute:
1. Set the folder containing the library to MATLAB current directory.
2. Read the parameter file.
3. Open the model to be executed.
4. Run the model.
2. Read the parameter file.
3. Open the model to be executed.
4. Run the model.
Download
Ver. 1.0.1
for R2021a
Ver. 1.0.1
for R2021a