
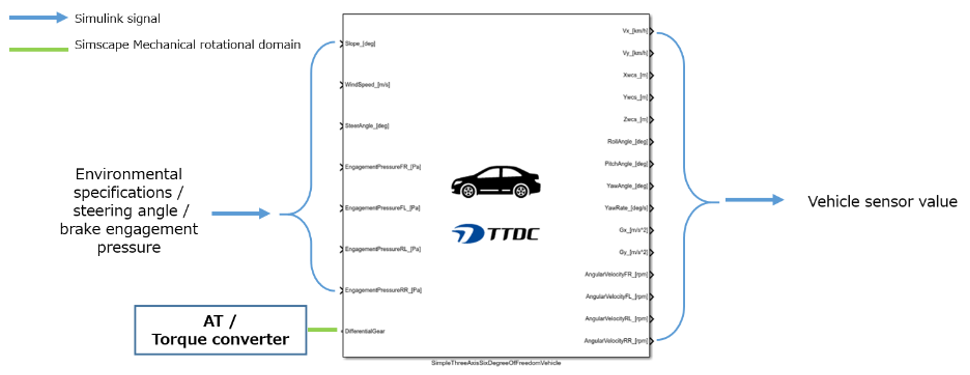
ディファレンシャルギア、シャシー、ブレーキ、タイヤ、サスペンションを組み合わせた3軸6自由度の車両モデル。
入力端子へは、環境諸元、タイヤの実舵角、ブレーキの係合圧力を接続。
出力端子へは、車両センサー信号を接続。
物理量保存端子へは、機械回転系ドメイン信号を接続。
出力端子へは、車両センサー信号を接続。
物理量保存端子へは、機械回転系ドメイン信号を接続。
シンプル3軸6自由度車両モデル接続方法:
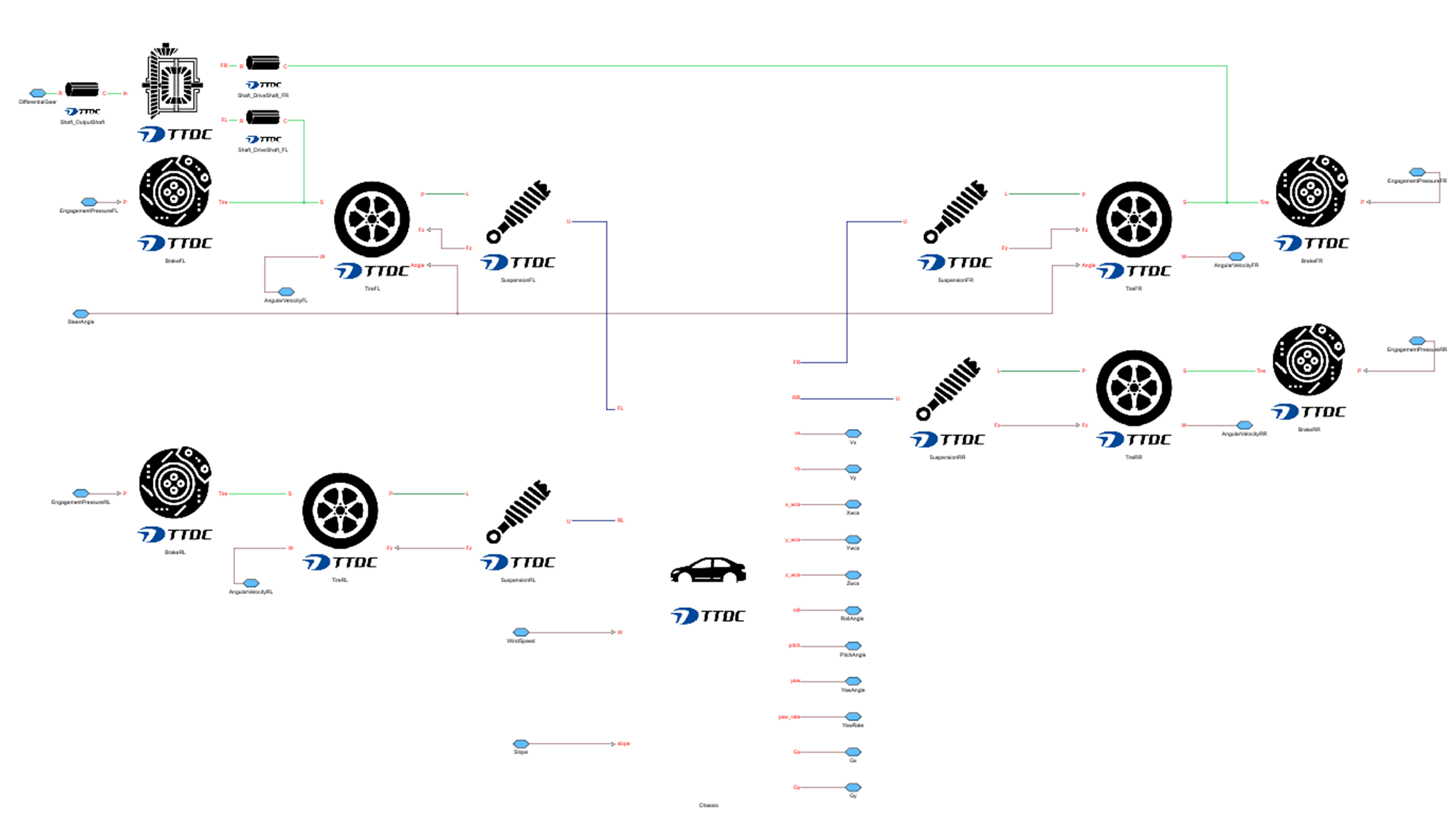
シンプル3軸6自由度車両モデル内部構成図:
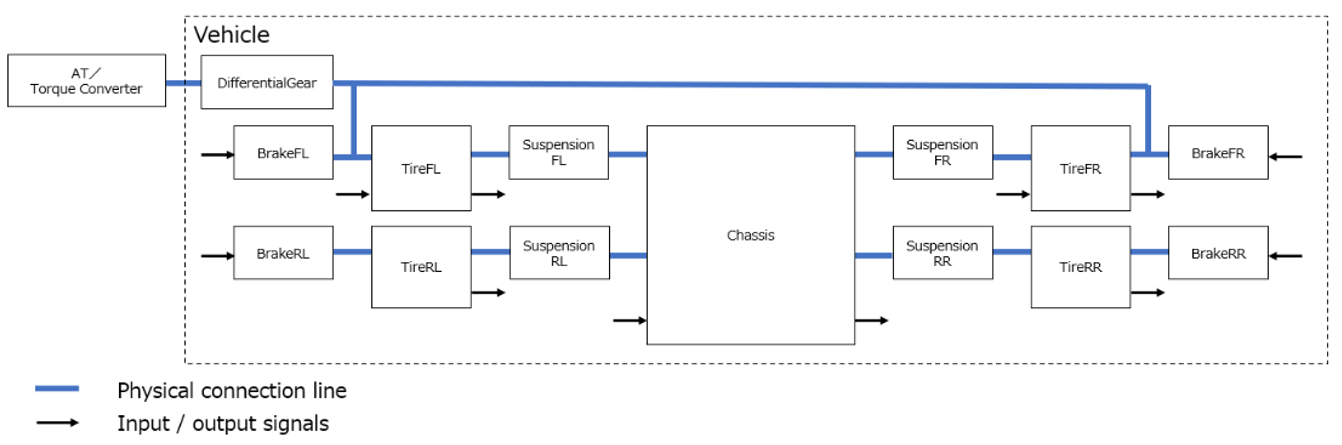
本モデルの内部構成
動作環境:

ブロック図:
ソルバー設定:
・グローバルソルバー
- ソルバー:任意
- 演算周期:ローカルソルバーの設定値に依存
・ローカルソルバー
- ソルバー:後退オイラー法
- 演算周期:1 msec
- イタレーション回数:3回
- ソルバー:任意
- 演算周期:ローカルソルバーの設定値に依存
・ローカルソルバー
- ソルバー:後退オイラー法
- 演算周期:1 msec
- イタレーション回数:3回
モデル制約条件:
- 本モデルは、実機通りの挙動及び挙動精度を模擬または保証するものではない。
- ライブラリフォルダ内のファイル構成を変更した場合、本モデルは動作しない。
- 上記の動作環境、ソルバー設定以外での動作は保証対象外。
- 付属のパラメータセット以外での動作は保証対象外。
- モデル内のLookuptableの設定は、内挿:Linear、外挿:Nearest(最終データ保持)で固定。
- 初期状態は、停車状態とした。
- 初期状態では、AT/トルクコンバータ側のモデルは停止状態とすること。
- ライブラリフォルダ内のファイル構成を変更した場合、本モデルは動作しない。
- 上記の動作環境、ソルバー設定以外での動作は保証対象外。
- 付属のパラメータセット以外での動作は保証対象外。
- モデル内のLookuptableの設定は、内挿:Linear、外挿:Nearest(最終データ保持)で固定。
- 初期状態は、停車状態とした。
- 初期状態では、AT/トルクコンバータ側のモデルは停止状態とすること。
実行方法:
1. ライブラリがあるフォルダをMATLABカレントディレクトリに設定する。
2. パラメータを読み込む。
3. 実行対象のモデルを開く。
4. モデルを実行する。
2. パラメータを読み込む。
3. 実行対象のモデルを開く。
4. モデルを実行する。
Ver. 1.3.0
for R2021a