Download
Ver. 1.3.0
for R2021a

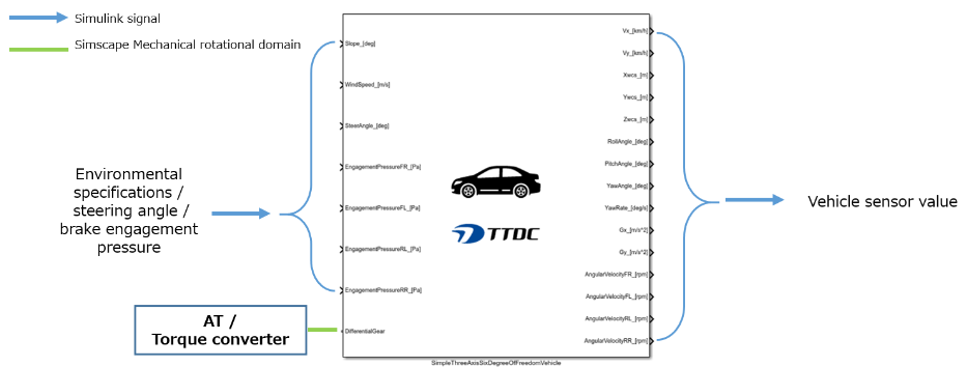
Simple three axis six degree of freedom vehicle model that combines differential gear, chassis, brakes, tires, and suspensions.
Connect environmental specifications, actual steering angle of the tire, and engagement pressure of the brake to the input port.
Connect the vehicle sensor signal to the output port.
Connect the mechanical rotational domain signal to the physical conserving port.
Connect the vehicle sensor signal to the output port.
Connect the mechanical rotational domain signal to the physical conserving port.
To connect simple three axis six degree of freedom vehicle model:
Simple three axis six degree of freedom vehicle model internal configuration diagram:
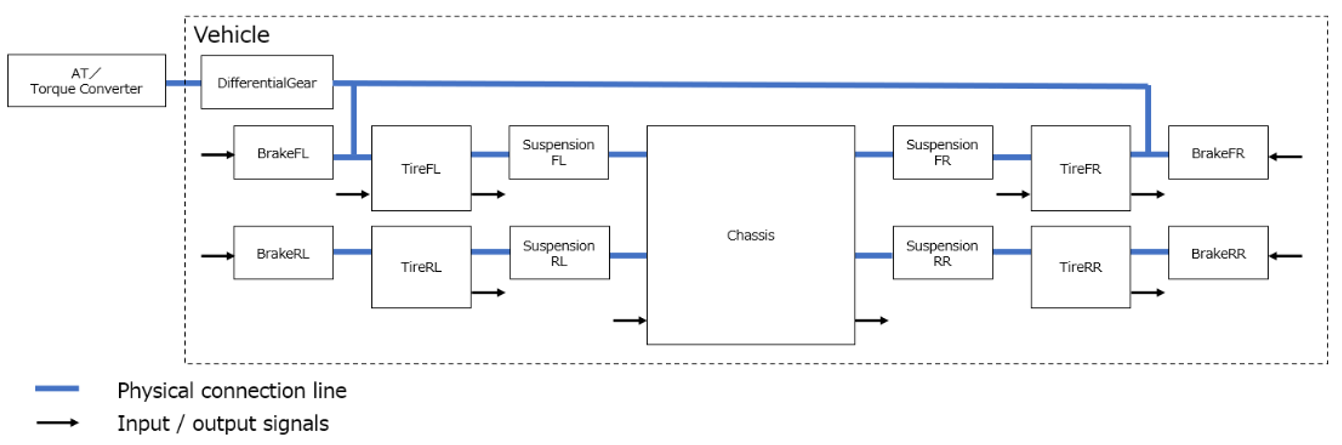
The internal configuration of this model
Operating environment:

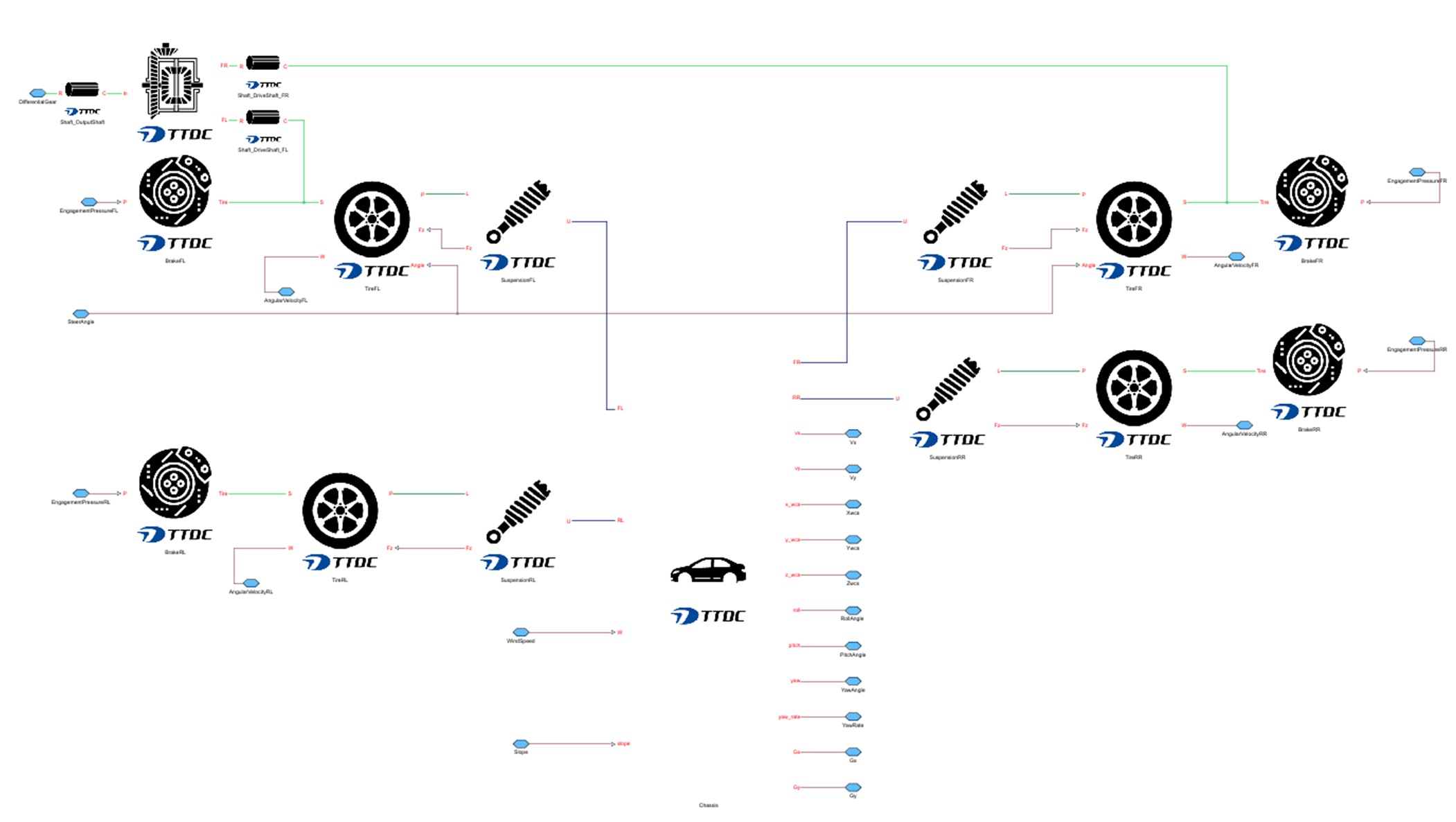
Block diagram:
Solver settings:
・Global solver
- Solver: Arbitrary
- Sample time: Dependents on the setting value of the local solver
・Local solver
- Solver: Backward Euler method
- Sample time: 1 msec
- Number of iterations: 3 times
- Solver: Arbitrary
- Sample time: Dependents on the setting value of the local solver
・Local solver
- Solver: Backward Euler method
- Sample time: 1 msec
- Number of iterations: 3 times
Model constraints:
- This model does not simulate or guarantee the behavior and behavior accuracy of the actual machine.
- If the file structure in the library folder is changed, this model does not work.
- Operation in other than the above operating environment and solver settings is not covered by the warranty.
- Operation with other than the supplied parameter set is not covered by the warranty.
- The setting of Lookuptable in the model is fixed by interpolation: Linear, and extrapolation: Nearest (final data-retention).
- In the initial state, the car is stopped.
- In the initial state, the model on the AT/torque converter side shall be in the stopped state.
- If the file structure in the library folder is changed, this model does not work.
- Operation in other than the above operating environment and solver settings is not covered by the warranty.
- Operation with other than the supplied parameter set is not covered by the warranty.
- The setting of Lookuptable in the model is fixed by interpolation: Linear, and extrapolation: Nearest (final data-retention).
- In the initial state, the car is stopped.
- In the initial state, the model on the AT/torque converter side shall be in the stopped state.
How to execute:
1. Set the folder containing the library to MATLAB current directory.
2. Read the parameter file.
3. Open the execution target model.
4. Run the model.
2. Read the parameter file.
3. Open the execution target model.
4. Run the model.
Download
Ver. 1.3.0
for R2021a
Ver. 1.3.0
for R2021a