Download
Ver. 1.0.0
for R2021a

This model is a brushed DC motor system, a physical model and a control model.
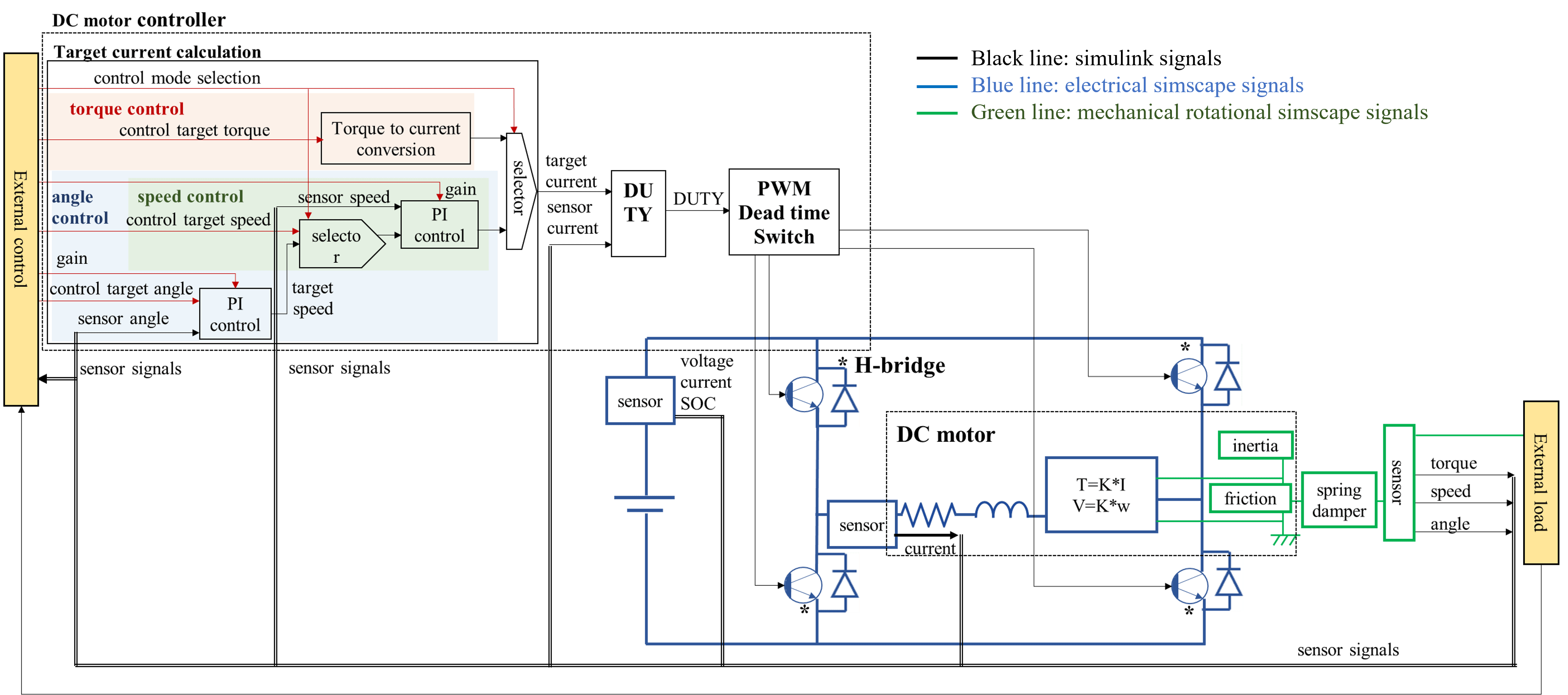
The control model includes some calculators for a target current, a duty and a PWM signal.
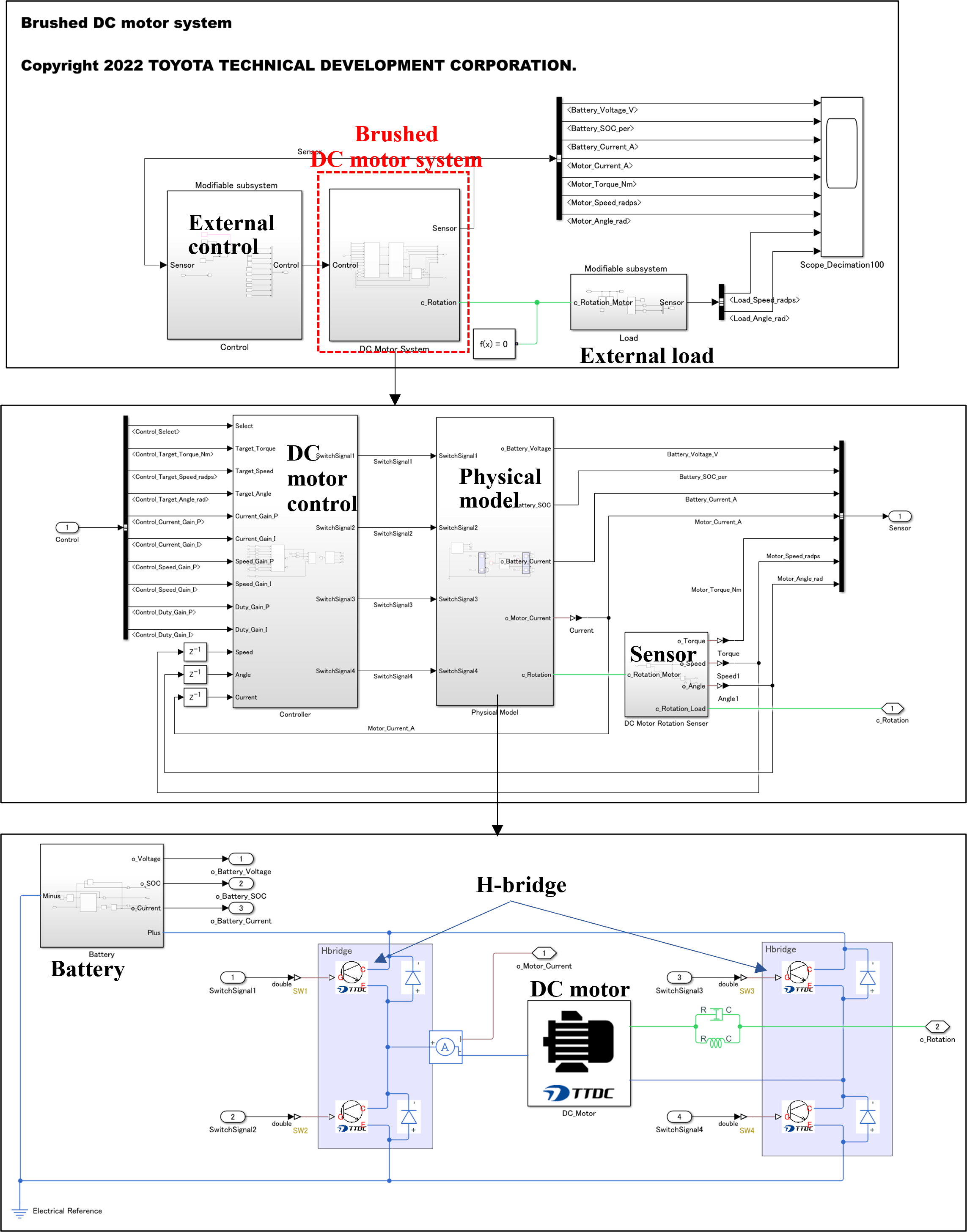
The physical model includes a battery, an H-bridge, and a equivalent circuit DC motor.
The control model includes some calculators for a target current, a duty and a PWM signal.
The physical model includes a battery, an H-bridge, and a equivalent circuit DC motor.
The model works as follows.
・Control
The target current, DUTY, and PWM signal are calculated from the sensor signal and control signal (position/speed/torque).
・Physical model
The IGBT in the H-bridge is turned ON/OFF (by PWM signal), and the current of the brushed DC motor is calculated.
・Control
The target current, DUTY, and PWM signal are calculated from the sensor signal and control signal (position/speed/torque).
・Physical model
The IGBT in the H-bridge is turned ON/OFF (by PWM signal), and the current of the brushed DC motor is calculated.
Input / output signals are connected as follows.
Connect the control signals to the input ports.
Connect the sensor signals to the output ports.
Connect the mechanical rotational domain signal of an external load to the physical conserving port.
Connect the control signals to the input ports.
Connect the sensor signals to the output ports.
Connect the mechanical rotational domain signal of an external load to the physical conserving port.
List of signals:
・Control signals
control mode selection, control torque, control speed, control position, P gain, I gain
・Sensor signals
battery voltage / SOC / current, motor current / torque / speed / angle
control mode selection, control torque, control speed, control position, P gain, I gain
・Sensor signals
battery voltage / SOC / current, motor current / torque / speed / angle
How to connect:
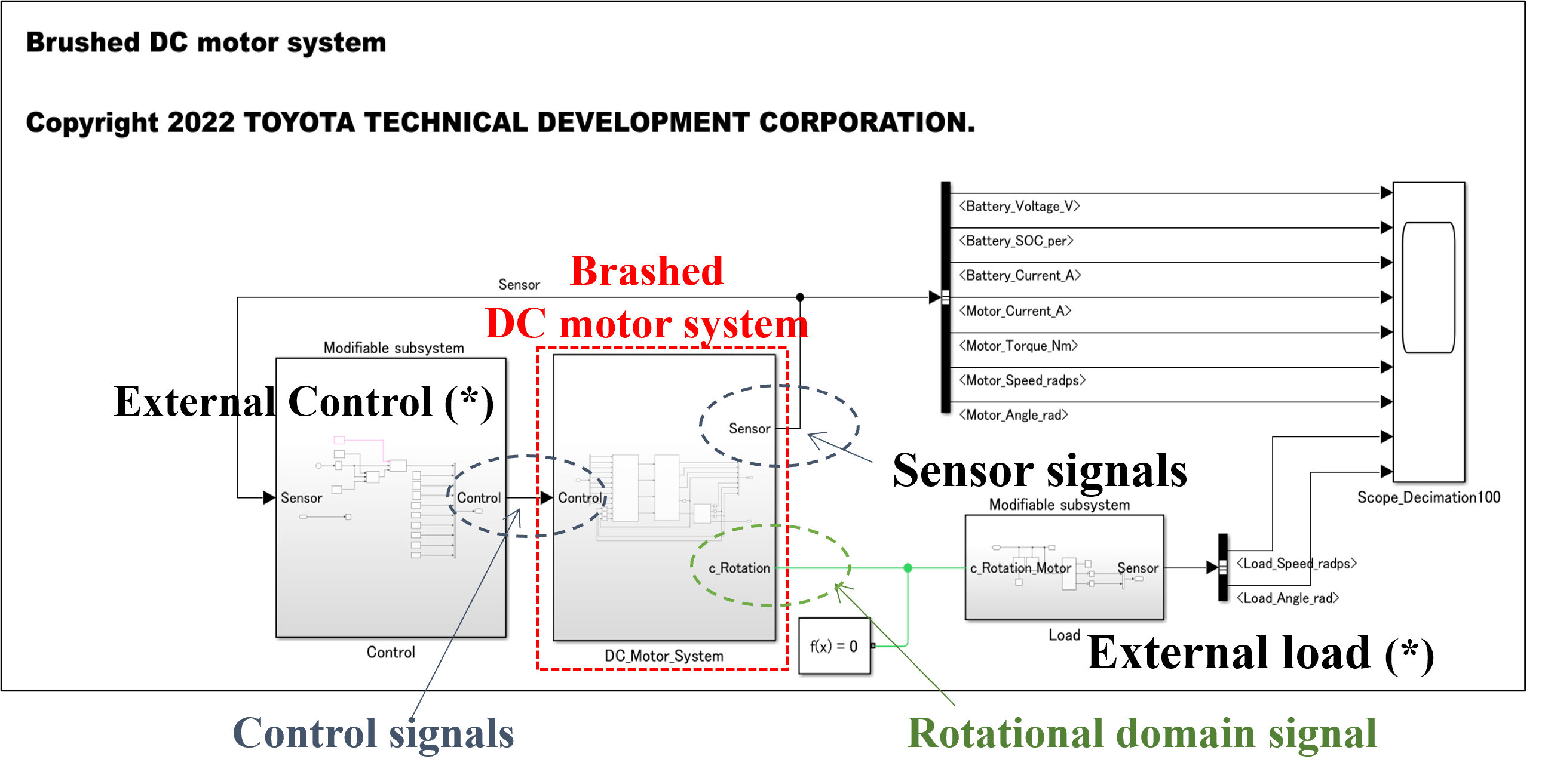
* The external control controls the DC motor system, and the external load connects with the motor.
External control External load
Engine control Waste gate valve, throttle valve
Steering control Steering shaft
Internal configuration diagram:
The internal structure of this model is shown in the figure below.
Operating environment:

Block diagram:
Solver settings:
・ Global solver
- Solver: Arbitrary
- Sample time: Dependents on the setting value of the local solver
・ Local solver
- Solver: Partitioning or Backward Euler method (choose the appropriate solver for external load)
- Sample time: 5 micro seconds
- Number of iterations: 3 times
- Solver: Arbitrary
- Sample time: Dependents on the setting value of the local solver
・ Local solver
- Solver: Partitioning or Backward Euler method (choose the appropriate solver for external load)
- Sample time: 5 micro seconds
- Number of iterations: 3 times
Model constraints:
- This model does not simulate or guarantee the behavior and behavior accuracy of the actual machine.
- If the file structure in the library folder is changed, this model does not work.
- It may not work with other operating environments or solver settings than those listed above.
- It may not work with parameter sets other than those provided.
- The initial state is a stopped state.
- If the file structure in the library folder is changed, this model does not work.
- It may not work with other operating environments or solver settings than those listed above.
- It may not work with parameter sets other than those provided.
- The initial state is a stopped state.
How to execute:
1. Move the MATLAB current directory to the folder where the model files are located.
2. Execute the parameter file.
3. Open the model file.
4. Run the model.
2. Execute the parameter file.
3. Open the model file.
4. Run the model.
Download
Ver. 1.0.0
for R2021a
Ver. 1.0.0
for R2021a