Download
Ver. 1.0.0
for R2021a

There is only a Japanese version of this model. It is only supported in the Japanese Windows environment. Don't hesitate to contact us from the "Contact" form if you want to use the model in different environments.
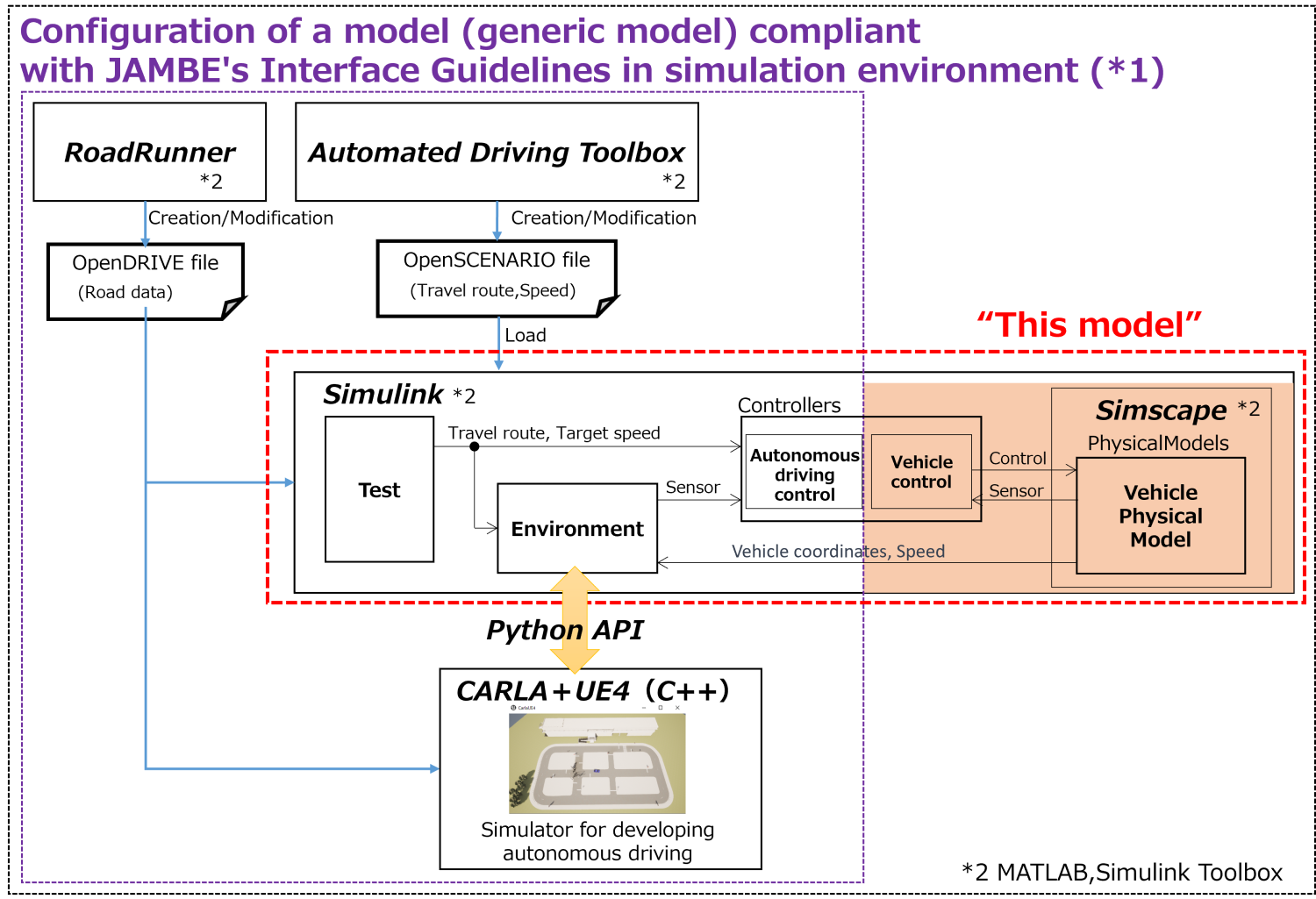
This model is an autonomous driving simulation model.
By integrating vehicle control and vehicle physical models for BEV into a generic model (*1) of the autonomous driving simulation environment,
it is possible to evaluate the cooperative system of autonomous driving control and vehicle motion control, including driving and vehicle motion control.
By integrating vehicle control and vehicle physical models for BEV into a generic model (*1) of the autonomous driving simulation environment,
it is possible to evaluate the cooperative system of autonomous driving control and vehicle motion control, including driving and vehicle motion control.
*1 Outputs from the Ministry of Economy, Trade and Industry's subsidy program (refer to the website of RYOMO SYSTEMS CO., LTD. below).
Autonomous driving simulation environment
How to connect:
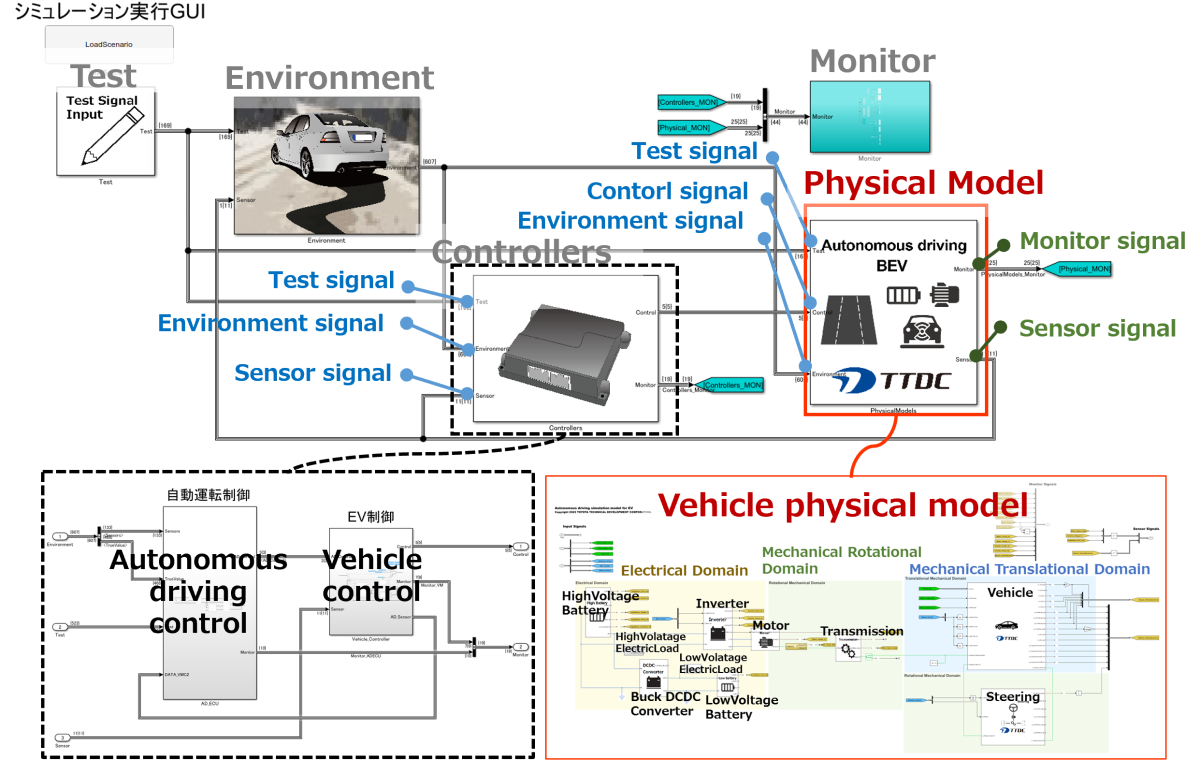
Internal configuration diagram:
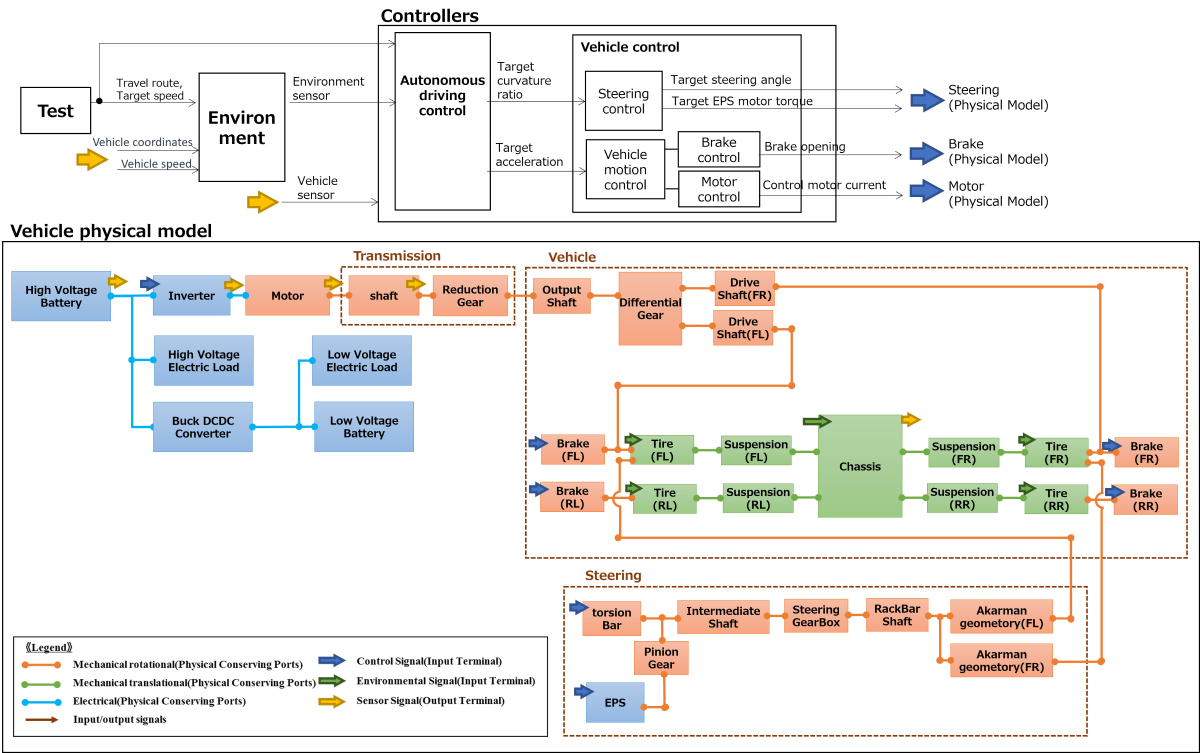
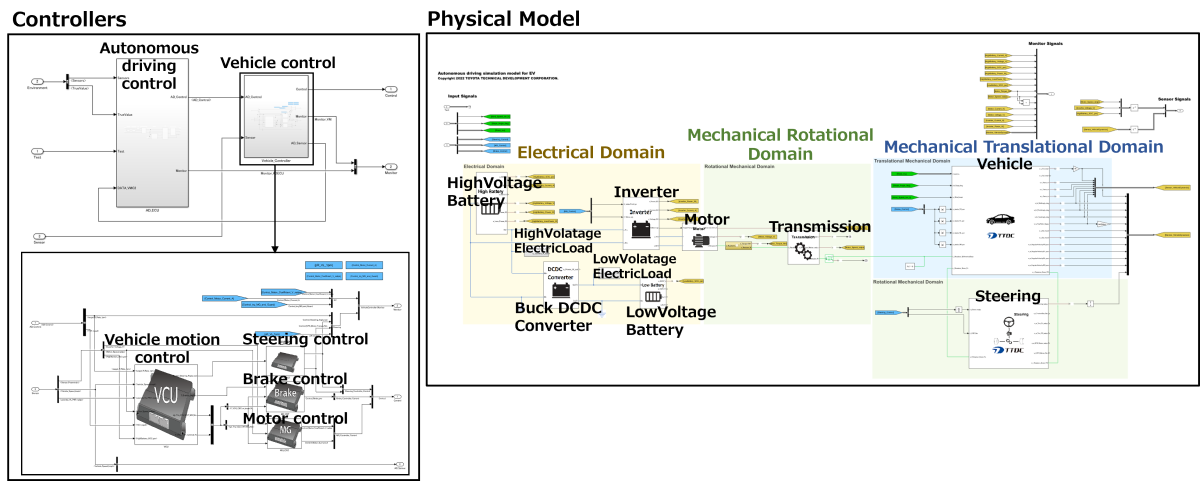
Block diagram:
The block diagram of the vehicle control (Controllers) and vehicle physical model (PhysicalModels) is shown in the figure below.
Recommended hardware to run CARLA:

Operating environment:

Solver settings:
・ Global solver
- Solver: ODE1
- Sample time: 2.5 msec
・ Local solver
- Solver: Backward Euler method
- Sample time: 2.5 msec
- Number of iterations: 3 times
- Solver: ODE1
- Sample time: 2.5 msec
・ Local solver
- Solver: Backward Euler method
- Sample time: 2.5 msec
- Number of iterations: 3 times
Model constraints:
- This model does not simulate or guarantee the behavior and behavior accuracy of the actual machine.
- This model does not support code generation or rapid accelerators.
- If the file structure in the library folder is changed, this model does not work.
- It may not work with other operating environments or solver settings than those listed above.
- It may not work with parameter sets other than those provided.
- The initial state is a stopped state.
- This model does not support code generation or rapid accelerators.
- If the file structure in the library folder is changed, this model does not work.
- It may not work with other operating environments or solver settings than those listed above.
- It may not work with parameter sets other than those provided.
- The initial state is a stopped state.
Download
Ver. 1.0.0
for R2021a
Ver. 1.0.0
for R2021a