Download
Ver. 1.0.0
for R2021a

This model is a physical model for steering performance simulation of a CVT gasoline vehicle.
It calculates the vehicle motion performance including the toe angle, caster angle, and tire behavior due to deformation and relaxation length.
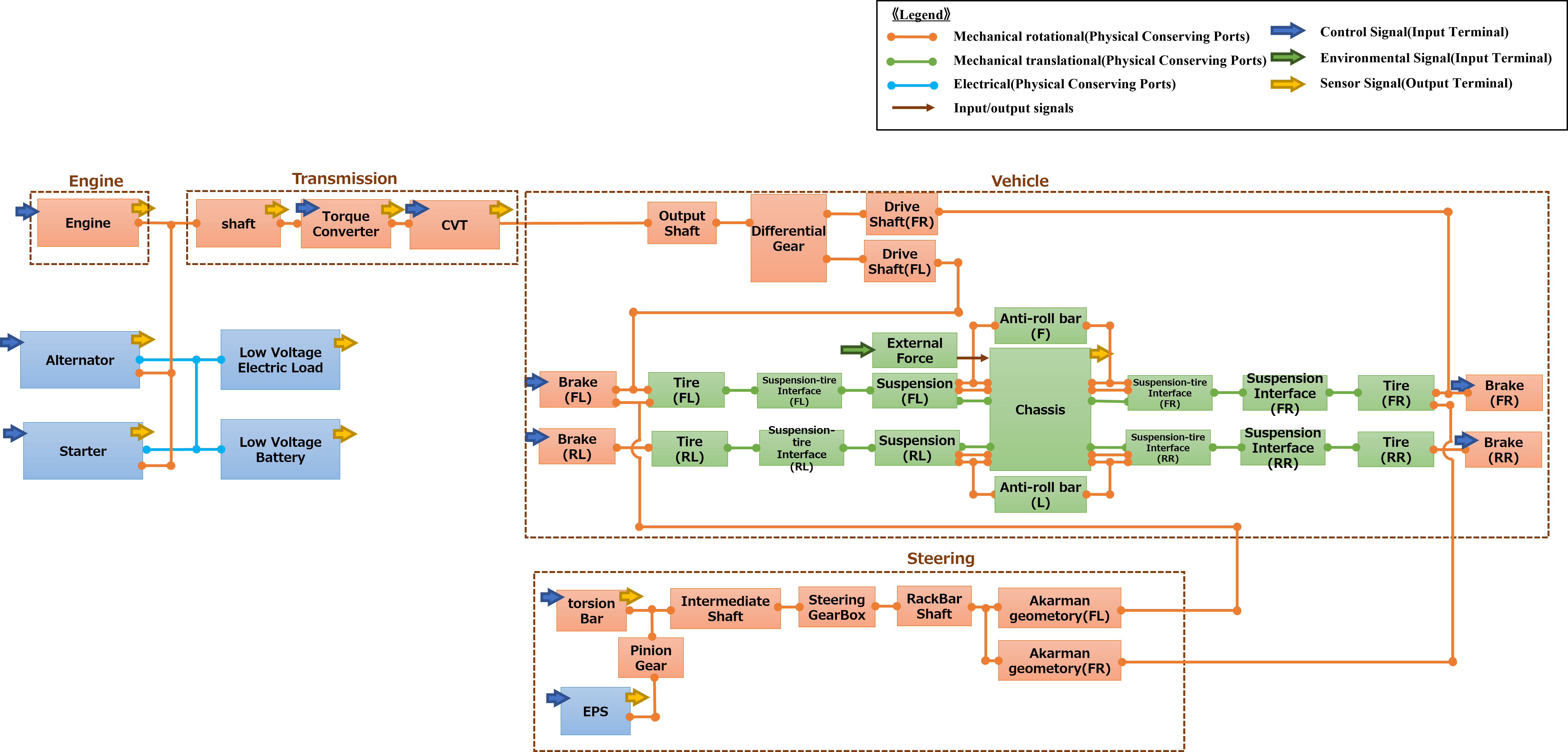
The powertrain consists of an engine (displacement 1.5 [L]), starter, alternator, transmission (CVT), differential gear, brake, vehicle, and low-voltage battery.
The powertrain consists of an engine (displacement 1.5 [L]), starter, alternator, transmission (CVT), differential gear, brake, vehicle, and low-voltage battery.
List of signals:
・Control signals
Throttle opening, Idling stop flag,
Fuel cut flag, Ignition timing from MBT,
CVT pulley ratio, Torque converter lockup instruction flag,
Brake opening (4 wheels), Target motor torque,
Driver's steering operation torque,
Starter operation flag, Alternator target voltage
・Environmental signals
Slope angle of road, Bank angle of road, Wind speed
・Sensor signals
Engine speed, Transmission output speed,
Low voltage battery SOC, Torsion bar torque,
Steering angular velocity, EPS motor angular velocity,
Vehicle speed, Yaw rate
Throttle opening, Idling stop flag,
Fuel cut flag, Ignition timing from MBT,
CVT pulley ratio, Torque converter lockup instruction flag,
Brake opening (4 wheels), Target motor torque,
Driver's steering operation torque,
Starter operation flag, Alternator target voltage
・Environmental signals
Slope angle of road, Bank angle of road, Wind speed
・Sensor signals
Engine speed, Transmission output speed,
Low voltage battery SOC, Torsion bar torque,
Steering angular velocity, EPS motor angular velocity,
Vehicle speed, Yaw rate
* This physical model can be connected to the control model, which is a case study model in “Plant Modeling I/F Guidelines for Vehicle Development” published by the of Japan Automotive Model-Based Engineering center.
* In this model, the x, y and z-axis direction is defined Vehicle Cartesian coordinate system. (The positive direction of the x-axis is to the front of the vehicle, the positive direction of the y-axis is to the left of the vehicle, and the positive direction of the z-axis is to the top of the vehicle.) For roll, pitch, and yaw are defined in right-handed coordinates.
How to connect :
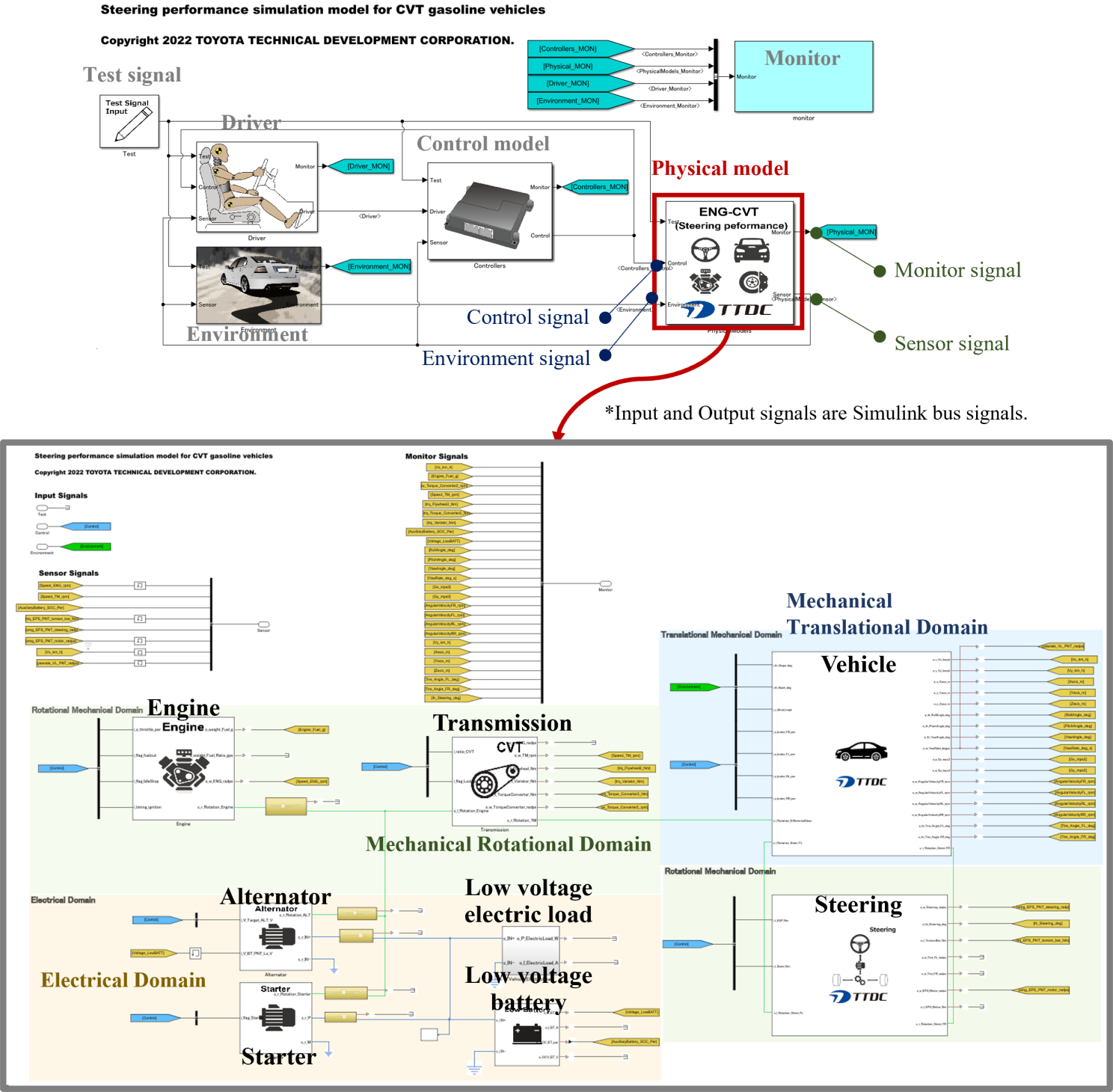
Internal configuration diagram :
Operating environment :

Block diagram :
Solver settings :
・ Global solver
- Solver: Arbitrary
- Sample time: Dependents on the local solver
・ Local solver
- Solver: Backward Euler method
- Sample time: 1 msec
- Number of iterations: 3 times
- Solver: Arbitrary
- Sample time: Dependents on the local solver
・ Local solver
- Solver: Backward Euler method
- Sample time: 1 msec
- Number of iterations: 3 times
Model constraints :
- This model does not simulate or guarantee the behavior and behavior accuracy of the actual machine.
- If the file structure in the library folder is changed, this model does not work.
- Operation in other than the above operating environment and solver settings is not covered by the warranty.
- Operation with other than the supplied parameter set is not covered by the warranty.
- In the initial state, the vehicle is stopped on a horizontal road, and the low, pitch, and yaw are all zero.
- If the file structure in the library folder is changed, this model does not work.
- Operation in other than the above operating environment and solver settings is not covered by the warranty.
- Operation with other than the supplied parameter set is not covered by the warranty.
- In the initial state, the vehicle is stopped on a horizontal road, and the low, pitch, and yaw are all zero.
How to execute :
1. Set the folder containing the library file to MATLAB current directory.
2. Read the parameter file.
3. Open the execution target model.
4. Run the model.
2. Read the parameter file.
3. Open the execution target model.
4. Run the model.
Download
Ver. 1.0.0
for R2021a
Ver. 1.0.0
for R2021a