
本モデルは電気自動車を想定した電費性能、熱性能向けシミュレーション用プラントモデルのプロトタイプ版である。
パワートレインはモーター(定格出力110kW)・減速機・車両・低圧バッテリー・高圧バッテリーから構成しており、
熱システムはラジエーター・HVACシステム・シートヒーター・PTCヒーターから構成している。
ただし、本モデルはプロトタイプであるため、プラントモデル内部は全て隠蔽化しており、編集することはできません。
※ 製品版は、本Webサイトにて2022年7月からリリース予定
本モデルの入出力端子は下記の通りである。
入力端子へは、制御信号と環境信号を接続。
出力端子へは、センサー信号やモニター信号を接続。
物理量保存端子へは、外部の接続無し。
パワートレインはモーター(定格出力110kW)・減速機・車両・低圧バッテリー・高圧バッテリーから構成しており、
熱システムはラジエーター・HVACシステム・シートヒーター・PTCヒーターから構成している。
ただし、本モデルはプロトタイプであるため、プラントモデル内部は全て隠蔽化しており、編集することはできません。
※ 製品版は、本Webサイトにて2022年7月からリリース予定
本モデルの入出力端子は下記の通りである。
入力端子へは、制御信号と環境信号を接続。
出力端子へは、センサー信号やモニター信号を接続。
物理量保存端子へは、外部の接続無し。
信号一覧:
・制御信号
ブレーキ開度、制御モーター電流、制御電圧(ex. ウォーターポンプ)、制御電力(ex. シートヒーター)、制御充電電流
・環境信号
路面情報、風速、外気温、etc.
・センサー信号
車速、回転数、トルク、電流、電圧、電力、温度
※ 本モデルは、MBD推進センター発行の「自動車開発におけるプラントモデルIFガイドライン」の事例モデルの制御部と接続可能なプラントモデルとなっている。
ブレーキ開度、制御モーター電流、制御電圧(ex. ウォーターポンプ)、制御電力(ex. シートヒーター)、制御充電電流
・環境信号
路面情報、風速、外気温、etc.
・センサー信号
車速、回転数、トルク、電流、電圧、電力、温度
※ 本モデルは、MBD推進センター発行の「自動車開発におけるプラントモデルIFガイドライン」の事例モデルの制御部と接続可能なプラントモデルとなっている。
接続方法 :
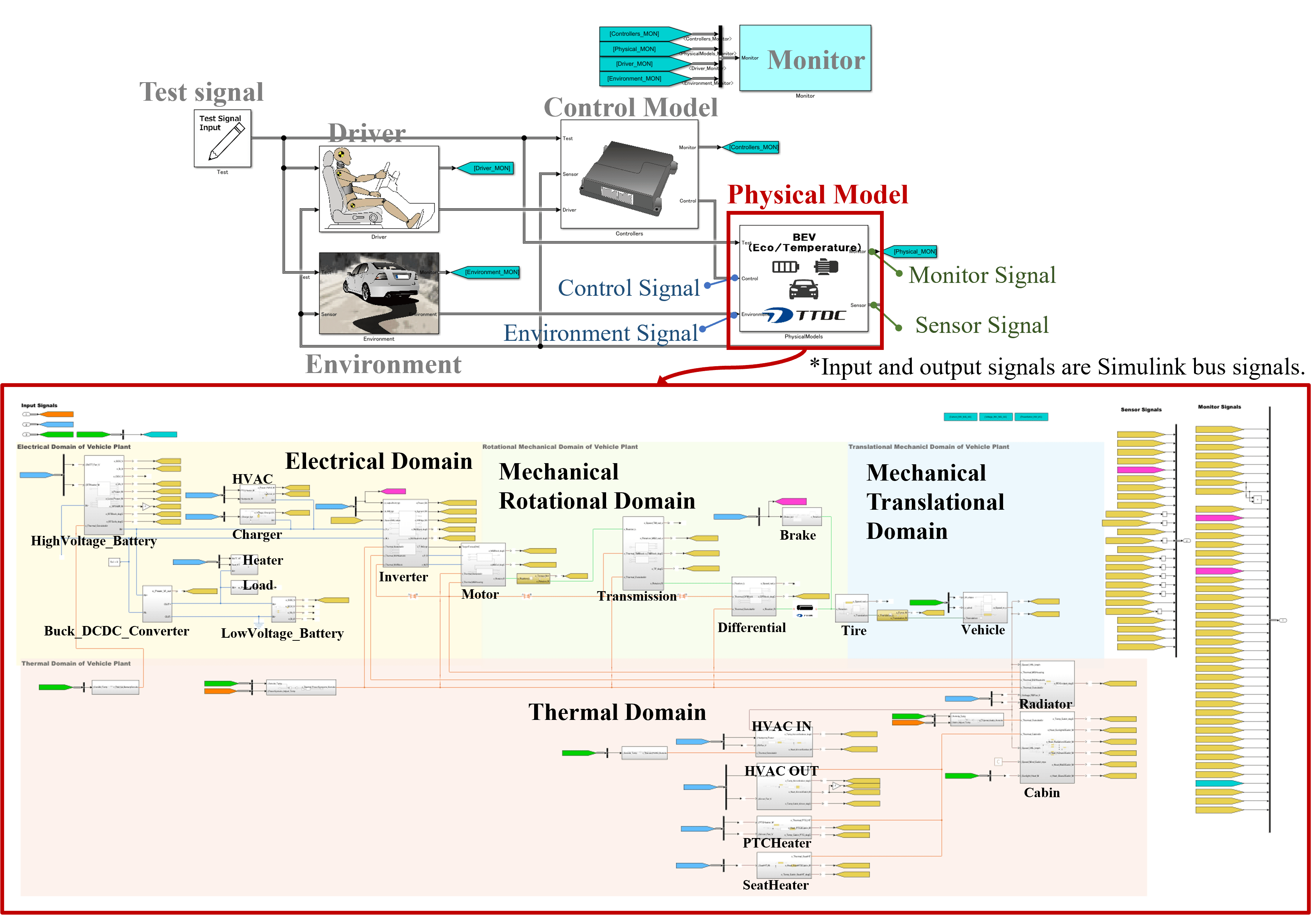
クリックで画像を拡大
内部構成図 :
本モデルの内部構成を下図に示す。
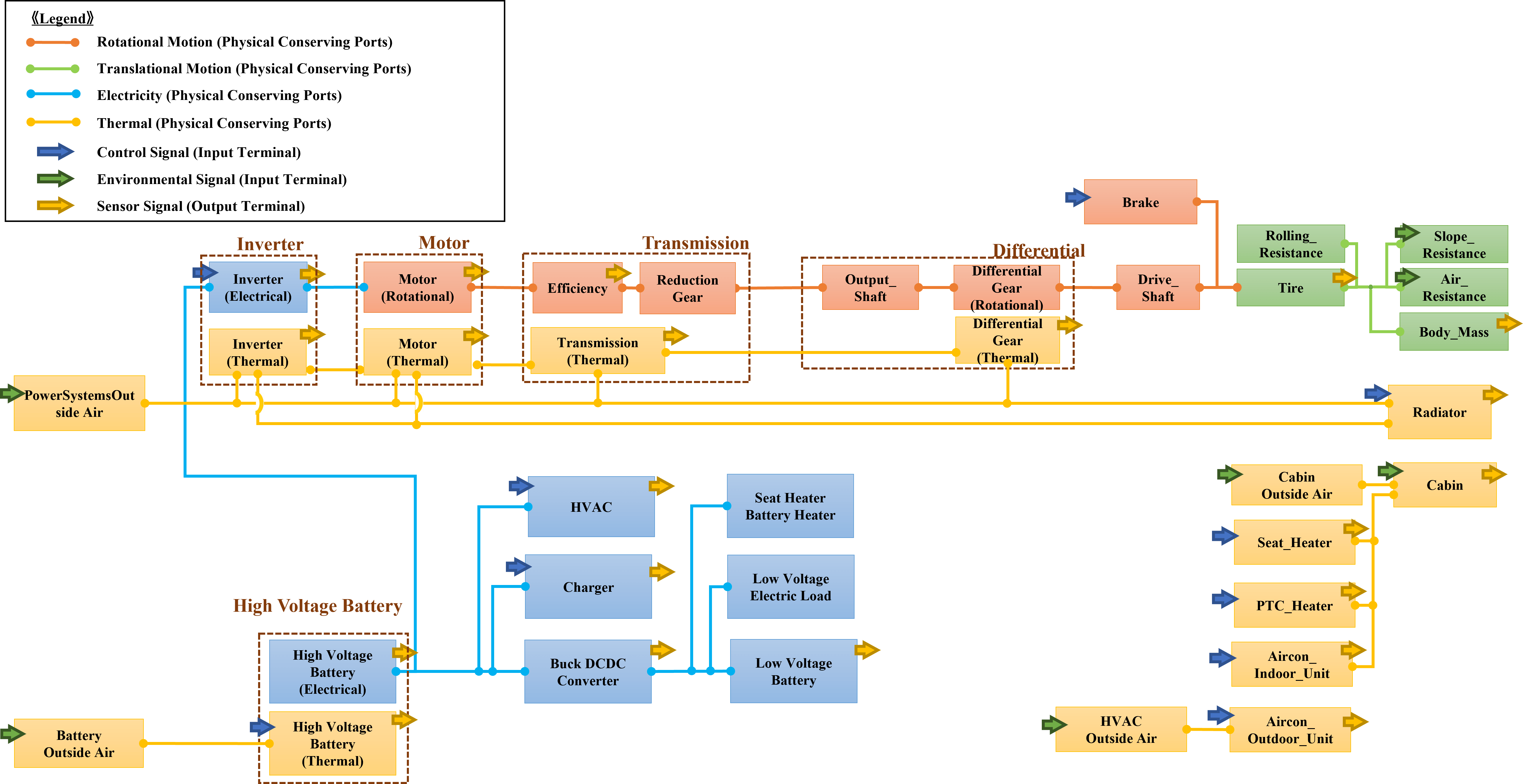
クリックで画像を拡大
動作環境 :

ブロック図 :
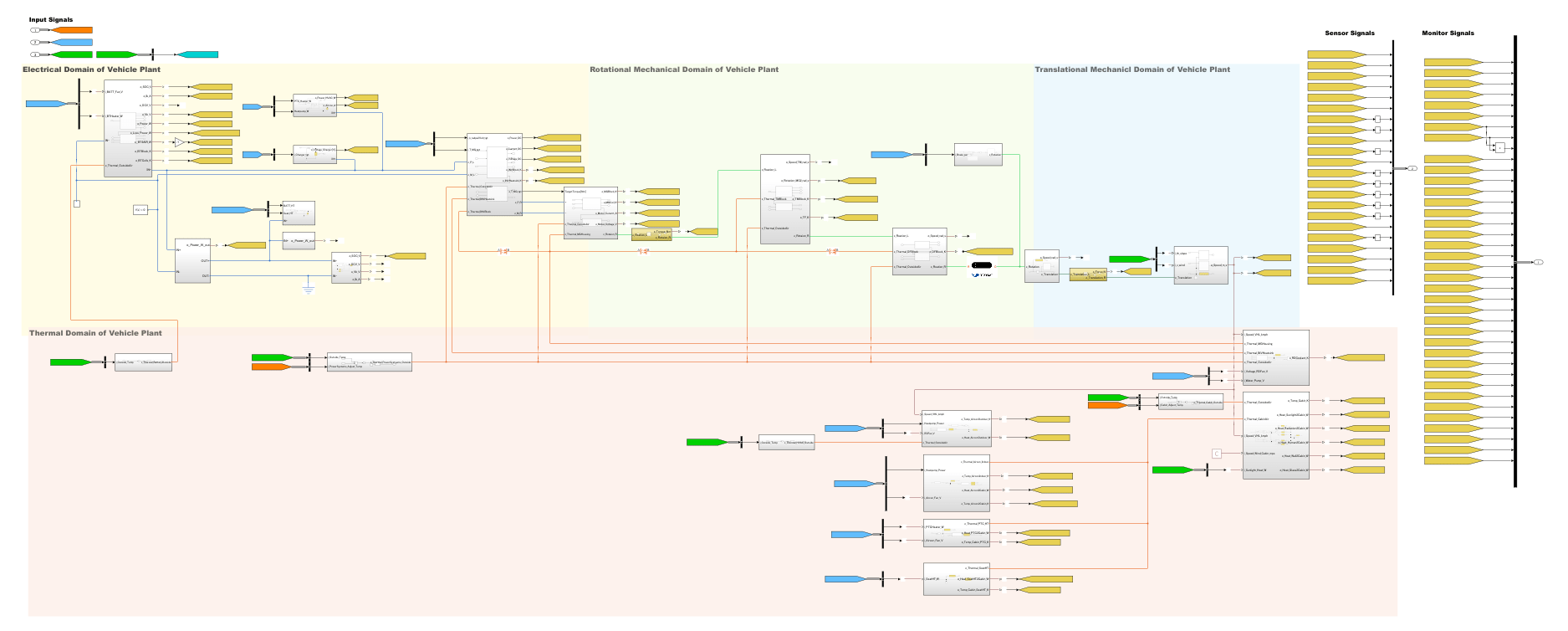
クリックで画像を拡大
ソルバー設定 :
・グローバルソルバー
- ソルバー:任意
- 演算周期:ローカルソルバーの設定値に依存
・ローカルソルバー
- ソルバー:後退オイラー法
- 演算周期:2.5 msec
- イタレーション回数:3回
- ソルバー:任意
- 演算周期:ローカルソルバーの設定値に依存
・ローカルソルバー
- ソルバー:後退オイラー法
- 演算周期:2.5 msec
- イタレーション回数:3回
モデル制約条件 :
- 本モデルは、実機通りの挙動及び挙動精度を模擬または保証するものではない。
- ライブラリフォルダ内のファイル構成を変更した場合、本モデルは動作しない。
- 上記の動作環境、ソルバー設定以外での動作は保証対象外。
- 付属のパラメータセット以外での動作は保証対象外。
- 初期状態は、停車状態とした。
- ライブラリフォルダ内のファイル構成を変更した場合、本モデルは動作しない。
- 上記の動作環境、ソルバー設定以外での動作は保証対象外。
- 付属のパラメータセット以外での動作は保証対象外。
- 初期状態は、停車状態とした。
実行方法 :
1. モデルファイルがあるフォルダへMATLABカレントディレクトリを移動する。
2. パラメータファイルを実行する。
3. モデルファイルを開く。
4. モデルを実行する。
2. パラメータファイルを実行する。
3. モデルファイルを開く。
4. モデルを実行する。
